EMC Software
Introduction
As part of our collaboration with the
OMAC User's Group,
we have written software which implements real-time control of
equipment such as machine tools, robots, and coordinate measuring
machines. The goal of this software development is twofold: first, to
provide complete software implementations of all OMAC modules for the
purpose of validating application programming interfaces; and second,
to provide a vehicle for the transfer of control technology to small-
and medium-sized manufacturers via the NIST
Manufacturing Extension
Partnership.
The EMC software is based on the NIST Real-time Control System (RCS)
Methodology, and is programmed using the NIST RCS Library. The
RCS Library eases the porting of controller code to a variety of Unix
and Microsoft platforms, providing a neutral application programming
interface (API) to operating system resources such as shared memory,
semaphores, and timers. The RCS Library also implements a
communication model, the Neutral
Manufacturing Language, which allows control processes to read and
write C++ data structures throughout a single homogeneous environment
or a heterogeneous networked environment.
The EMC software is written in C and C++, and has been ported to the
PC Linux, Windows NT, and Sun Solaris
operating systems. When running actual equipment, a
real-time version of Linux
is used to achieve the deterministic computation rates required (200
microseconds is typical). The software can also be run entirely in
simulation, down to simulations of the machine motors. This enables
entire factories of EMC machines to be set up and run in a computer
integrated manufacturing environment. A Windows NT simulation self-installing
archive runs the controller on simulated DC motors, with a Java
GUI.
The EMC software is available free of charge on our FTP site. Please
read the README
file before getting or installing the software.

|
This software was prepared by United States Government employees as
part of their official duties and is, therefore, a work of the
U.S. Government and not subject to copyright.
|
The EMC at Work
EMCs have been installed on many machines, both with servo motors and
stepper motors. Here is a sampling:
|
3-axis Bridgeport knee mill at Shaver Engineering. The machine uses DC
brush servo motors and encoders for motion control, and OPTO-22
compatible I/O interfaced to the PC parallel port for digital I/O to
the spindle, coolant, lube, and estop systems.
|

|
|
3-axis desktop milling machine used for prototype development. The
machine uses DC brush servo motors and encoders. Spindle control is
accomplished using the 4th motion control axis. The machine cuts wax
parts.
|
|
4-axis Kearney & Trecker horizontal machining center at General Motors
Powertrain in Pontiac, MI. This machine ran a precursor to the
full-software EMC which used a hardware motion control board.
|

|
EMC Components
There are four components to the EMC software:
a motion controller (EMCMOT), a discrete I/O
controller (EMCIO), a task executor which
coordinates them (EMCTASK), and a collection
of text-based or graphical user interfaces.
Graphical User Interfaces
The EMC comes with several types of user interfaces: an interactive
command-line program emcpanel, a
character-based screen graphics program keystick, an X Windows program xemc, a Java-based GUI emcgui, and a Tcl/Tk-based GUI TkEmc.
TkEmc is most well-supported, and runs on Linux and Microsoft
Windows. The Windows version can connect to a real-time EMC running on
a Linux machine via a network connection, allowing the monitoring of
the machine from a remote location. TkEmc comes with the Linux
distribution of the EMC. Instructions for installing and configuring
the Windows version can be found in wintkemc.html.
Motion Controller EMCMOT
The motion controller (Figure 1) is written in C for maximum
portability to real-time operating systems. Motion control includes
sampling the position of the axes to be controlled, computing the next
point on the trajectory, interpolating between these trajectory
points, and computing an output to the motors. For servo systems, the
output is based on a PID compensation algorithm. For stepper systems,
the calculations run open-loop, and pulses are sent to the steppers
based on whether their accumulated position is more than a pulse away
from where their commanded position should be.
The motion controller includes programmable software limits,
interfaces to hardware limit and home switches, PID servo compensation
with zero, first, and second order feedforward, maximum following
error, selectable velocity and acceleration values, individual axis
jogging (continuous, incremental, absolute), queued blended moves for
linear and generalized circular motion, and programmable forward and
inverse kinematics.
The motion controller is written to be fairly generic. Initialization files (with the same syntax
as Microsoft Windows INI files) are used to configure parameters such
as number and type of axes (e.g., linear or rotary), scale factors
between feedback devices (e.g., encoder counts) and axis units (e.g.,
millimeters), servo gains, servo and trajectory planning cycle times,
and other system parameters. Complex kinematics for robots can be
coded in C according to a prescribed function
interface and linked in to replace the default 3-axis Cartesian
machine kinematics routines. A C
language application programming interface (API) between the
motion controller and the external world is provided so that specific
hardware can be integrated into the EMC without modifying any of the
core control code. Programmers must implement these API functions for
each board.
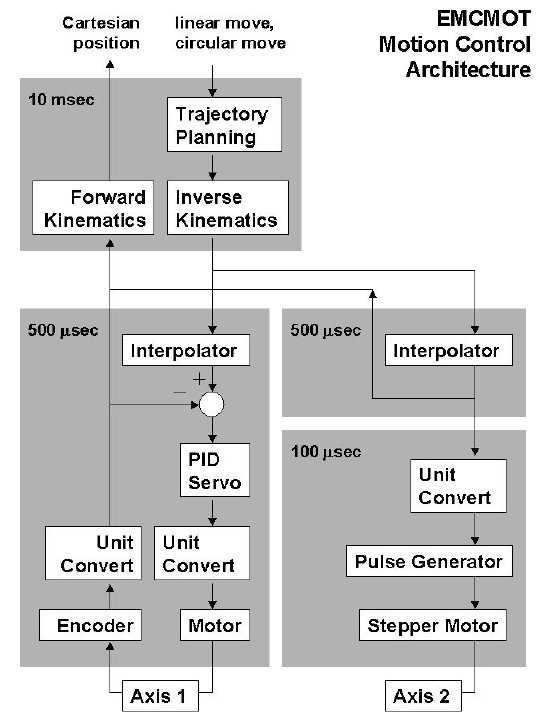
Figure 1. Motion controller software architecture. This figure shows
two axes of control, with axis 1 using a servo motor and axis 2 using
a stepper motor. For steppers, the commanded position is feed back
directly as the motor position, so the system operates open-loop. A
second task compares the output position with the accumulated pulse
count, and generates a pulse if the difference is greater than half
the pulse distance. The motion controller is a single C program,
executing cyclically. When controlling actual machines, the motion
controller requires a real-time operating
system. In our installations, we have used
RT-Linux. This gives
real-time deterministic cycle times down to about 100
microseconds. The motion controller uses either shared memory or
RT-Linux FIFOs to receive commands or send status, error, or logging
information. NML is not used directly by the motion controller since
NML requires C++ and the coding was limited to C to maximize
portability to other real-time operating systems.
Setting up Stepper Motors
Currently the EMC supports stepper motors with a 2-bit
step-and-direction interface, with bits mapped to the parallel
port. Each parallel port has 12 bits of output and 5 bits of
input. The outputs are used to drive the step and direction of each
motor. 12 bits of output mean that up to 6 stepper motors can be
controlled. The inputs can be used to detect limit or home switch
trips. 5 bits of input mean that only one axes can get full positive,
negative, and home switch inputs. The EMC mapping compromises for 3
axes of stepper motor control, with all positive limit switches being
mapped to one input, all negative limit switches being mapped to
another input, and all home switches being mapped to a third
input. Other permutations are possible, of course, and can be changed
in the software. You could also add 2 additional parallel ports (LPT2,
LPT3), and get 36 bits of output and 15 bits of input. Some parallel
ports also let you take 4 outputs and use them as inputs, for 8
outputs and 9 inputs for each parallel port. This would let you get 3
axes of control and full switch input per parallel port. See
Using the PC
parallel port for digital I/O for more information on the parallel
port.
The pinout for the EMC stepper motor interface is as follows:
Output Parallel Port
------ -------------
X direction D0, pin 2
X clock D1, pin 3
Y direction D2, pin 4
Y clock D3, pin 5
Z direction D4, pin 6
Z clock D5, pin 7
Input Parallel Port
----- -------------
X/Y/Z lim + S3, pin 15
X/Y/Z lim - S4, pin 13
X/Y/Z home S5, pin 12
Stepper motor control is implemented using a second real-time task
that runs at 100 microseconds. This task writes the parallel port
output with bits set or cleared based on whether the a pulse should be
raised or lowered. This gives an effective period of 200 microseconds
for a full up-and-down pulse, or a 5 kilohertz frequency.
Discrete I/O Controller EMCIO
The discrete I/O controller (bottom right in Figure
2) is written in C++, using the NIST RCS Library. It
is based on a hierarchy of C++ controller classes derived from the NML_MODULE
base class, each communicating using NML.
Discrete I/O controllers are highly machine-specific, and are not
customizable in general using the INI file technique used to configure
the more generic motion controller.
A C language application programming interface (API) between the
discrete I/O controller and the external world is provided so that
specific hardware can be integrated into the EMC without modifying any
of the core control code. Programmers must implement these API
functions for each board.
Task Executor EMCTASK
The Task Executor (at the top in Figure
2) is coded similarly to the discrete I/O controller, using the
NML_MODULE base class and the RCS Library. It is less machine specific
than the discrete I/O controller, as it is responsible for
interpreting G and M code programs whose behavior does not vary
appreciably between machines.
External Programs
Indicated at the very top in Figure 2 is the fourth component of the
EMC software, the external programs such as the graphical user
interface (GUI) or flexible manufacturing system (FMS) which are used
to run the EMC. These communicate using NML, sending messages such as
power on, enter automatic mode, run a program, or power down. GUIs may
send manual commands initiated by the operator, for example jogging
machine axes in manual mode, or homing each axis.
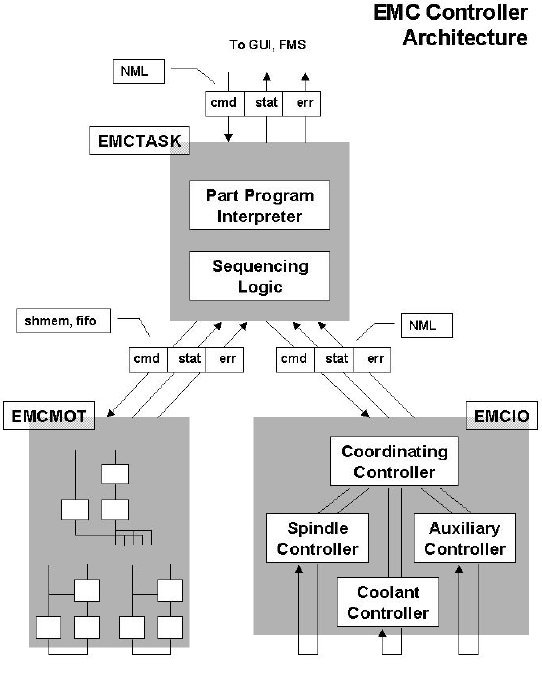
Figure 2. EMC controller software architecture. At the coarsest level,
the EMC is a hierarchy of three controllers: the task level command
handler and program interpreter, the motion controller, and the
discrete I/O controller. The motion controller is detailed in Figure 1. The discrete I/O controller is implemented
as a hierarchy of controllers, in this case for spindle, coolant, and
auxiliary (e.g., estop, lube) subsystems. The task controller
coordinates the actions of the motion and discrete I/O
controllers. Their actions are programmed in conventional numerical
control "G and M code" programs, which are interpreted by the task
controller into NML messages and sent to either the motion or discrete
I/O controllers at the appropriate times.
Configuring the EMC
The EMC is configured with files that are read at startup and used to
override the compiled defaults. No real controller will likely use the
compiled defaults, so you will certainly need to edit at least some of
these files to reflect the specifics of your machine.
There are four files: emc.ini, emc.nml, tool.tbl, and
rs274ngc.var. The first, emc.ini, contains all the machine parameters such
as servo gains, scale factors, cycle times, units, etc. and will
certainly need to be edited. emc.nml
contains communication settings for shared memory and network ports
you may need to override on your system, although it is likely that
you can leave these settings alone. tool.tbl
contains the tool information such as which pocket contains which
tool, and the length and diameter for each tool. rs274ngc.var contains variables specific to the
RS-274-NGC dialect of NC code, notably for setting the persistent
numeric variables for the nine work coordinate systems. The specific
formats of each of these files is detailed in the following sections.
Machine Configuration file emc.ini
The machine configuration file emc.ini follows the Microsoft INI file
format, in which values are associated with keywords on single lines,
perhaps in sections denoted with square brackets, e.g.,
[SECTION]
; COMMENT
SYMBOL = VALUE
Everything from the first non-whitespace character after the = up to
the end of the line is passed as the value, so you can embed spaces in
string symbols if you want to.
You can edit the values for each keyword in any text editor. The
changes won't take effect until the next time the controller is
run. The file should be called emc.ini, but the name can be overriden
using a command line argument to the controllers. See the section
"Starting Up" for information on how to do
this. The following sections detail each section of the configuration
file, using sample values for the configuration lines.
[EMC] Section
The [EMC] section contains general parameters for the whole
controller. These are:
-
VERSION = $Revision: 1.14 $
The version number for the INI file. This is automatically updated
when using the Revision Control System, which looks for the $Revision: 1.14 $
string and appends the revision number. If you want to edit this
manually just change the number and leave the other tags alone.
-
MACHINE = My Controller
This is the name of the controller, which is printed out when it
runs. You can put whatever you want here.
[TASK] Section
The [TASK] section contains general parameters for EMCTASK, which includes primarily the NC language
interpreter and the sequencing logic for sending commands to EMCMOT and EMCIO.
-
CYCLE_TIME = 0.100
The period, in seconds, at which EMCTASK
will run. You can make this as small as you want to increase the
throughput. Making it 0.0 or a negative number will tell EMCTASK not to sleep at all. Ultimately the system
loading will limit the effective throughput.
[TRAJ] Section
The [TRAJ] section contains general parameters for the trajectory
planning module in EMCMOT.
-
AXES = 3
The number of controlled axes in the system.
-
LINEAR_UNITS = 0.03937007874016
The number of linear units per millimeter. For systems executing in
native English (inch) units, this value is as shown above. For systems
executing in native millimeter units, this value is 1. This does not
affect the ability to program in English or metric units in NC
code. It is used to determine how to interpret the numbers reported in
the controller status by external programs.
-
ANGULAR_UNITS = 1.0
The number of angular units per degree. For systems executing in
native degree units, this value is as shown above. For systems
executing in radians, this value is 0.01745329252167, or PI/180.
-
CYCLE_TIME = 0.010
The period in seconds at which trajectory calculations are
performed. This is a multiple of the period at which servo
calculations are performed, as set in the [AXIS_#] CYCLE_TIME entry. Trajectory
calculations are called at multiples of the servo period to plan
linear or circular motion in Cartesian space. These values are
interpolated at the servo period and run through the inverse
kinematics.
-
DEFAULT_VELOCITY = 1.0
The initial velocity used for axis or coordinated axis motion, in user
units per second.
-
DEFAULT_ACCELERATION = 100.0
The initial acceleration used for axis or coordinated acis motion, in
user units per second per second.
-
MAX_VELOCITY = 5.0
The maximum velocity for any axis or coordinated move, in user units
per second.
-
MAX_ACCELERATION = 100.0
The maximum acceleration for any axis or coordinated axis move, in
user units per second per second.
[AXIS_#] Sections
The [AXIS_0], [AXIS_1], etc. sections contains general parameters for
the individual axis control modules in EMCMOT. The axis section names begin numbering at
0, and run through the number of axes specified in the [TRAJ] AXES entry minus 1.
-
TYPE = LINEAR
The type of axes, either LINEAR or ANGULAR. Values for the position of
LINEAR axes are in the units (per millimeter) specified in the [AXIS_#] UNITS entry. Values for
the position of ANGULAR axes are in the units (per degree) specified in
the same entry.
-
UNITS = 0.03937007874016
Units per millimeter for a LINEAR axis, as defined in the [AXIS_#] TYPE section, or units per degree for
an ANGULAR axis as defined in the same section.
The following parameters P, I, D, FF0, FF1, FF2 are used by the servo
compensation algorithm to optimize performance while tracking
trajectory setpoints. See Tuning Servos
for information on setting up a servomotor system.
-
P = 50
The proportional gain for the axis servo. This value multiplies the
error between commanded and actual position in user units, resulting
in a contribution to the computed voltage for the motor amplifier. The
units on the P gain are volts per user unit.
-
I = 0
The integral gain for the axis servo. The value multiplies the
cumulative error between commanded and actual position in user units,
resulting in a contribution to the computed voltage for the motor
amplifier. The units on the I gain are volts per user unit-seconds.
-
D = 0
The derivative gain for the axis servo. The value multiplies the
difference between the current and previous errors, resulting in a
contribution to the computed voltage for the motor amplifier. The
units on the D gain are volts per user unit per second.
-
FF0 = 0
The 0-th order feedforward gain. This number is multiplied by the
commanded position, resulting in a contribution to the computed
voltage for the motor amplifier. The units on the FF0 gain are volts
per user unit.
-
FF1 = 0
The 1st order feedforward gain. This number is multiplied by the
change in commanded position per second, resulting in a contribution
to the computed voltage for the motor amplifier. The units on the FF1
gain are volts per user unit per second.
-
FF2 = 0
The 2nd order feedforward gain. This number is multiplied by the
change in commanded position per second per second, resulting in a
contribution to the computed voltage for the motor amplifier. The
units on the FF2 gain are volts per user unit per second per second.
-
CYCLE_TIME = 0.001
This is the period in seconds at which servo calculations will
run. The values can be different between different axes, and the
lowest will be used for all. This ensures that the calculations will
occur at least as fast as they are specified here. The value should be
an integer submultiple of the trajectory cycle time specified in the
[TRAJ] CYCLE_TIME entry, so that an
integer number of interpolations will occur. If this is not the case
the times will be forced so that the interpolation interval is the
next highest integer.
-
INPUT_SCALE = 40000 0
These two values are the scale and offset factors for the axis input
from the raw feedback device, e.g., an incremental encoder. The second
value (offset) is subtracted from raw input (e.g., encoder counts),
and divided by the first value (scale factor), before being used as
feedback. The units on the scale value are in raw units (e.g., counts)
per user units (e.g., inch). The units on the offset value are in raw
units (e.g., counts).
Specifically, when reading inputs, the EMC first reads the raw sensor values.
The units on these values are the sensor
units, typically A/D counts, or encoder ticks. These units, and the
location of their 0 value, will not in general correspond to the
quasi-SI units used in the EMC. Hence a scaling is done immediately upon
sampling:
input = (raw - offset) / scale
The value for scale can be obtained analytically by doing a unit
analysis, i.e., units are [sensor units]/[desired input SI units]. For
example, on a 2000 counts per rev encoder, and 10 revs/inch gearing,
and desired units of mm, we have
[scale units] = 2000 [counts/rev] * 10 [rev/inch] * 1/25.4 [inch/mm]
= 787.4 counts/mm
and, as a result,
input [mm] = (encoder [counts] - offset [counts]) / 787.4 [counts/mm]
Note that the units of the offset are in sensor units, e.g., counts,
and they are pre-subtracted from the sensor readings. The value for
this offset is obtained by finding the value of counts for which you
want your user units to read 0.0. This is normally accomplished
automatically during a homing procedure.
-
OUTPUT_SCALE = 1 0
These two values are the scale and offset factors for the axis output
to the motor amplifiers. The second value (offset) is subtracted from
the computed output (in volts), and divided by the first value (scale
factor), before being written to the D/A converters. The units on the
scale value are in true volts per DAC output volts. The units on the
offset value are in volts. These can be used to linearize a DAC.
Specifically, when writing outputs, the EMC first converts the desired
output in quasi-SI units to raw actuator values, e.g., volts for an
amplifier DAC. This scaling looks like:
raw = (output - offset) / scale
The value for scale can be obtained analytically by doing a unit
analysis, i.e., units are [output SI units]/[actuator units]. For
example, on a machine with a velocity mode amplifier such that 1 volt
results in 250 mm/sec velocity, we have:
[scale units] = 250 [mm/sec] / 1 [volts]
= 250 mm/sec/volt
and, as a result,
amplifier [volts] = (output [mm/sec] - offset [mm/sec]) / 250 [mm/sec/volt]
Note that the units of the offset are in user units, e.g., mm/sec, and
they are pre-subtracted from the sensor readings. The value for this
offset is obtained by finding the value of your output which yields
0.0 for the actuator output. If the DAC is linearized, this offset is
normally 0.0.
The scale and offset can be used to linearize the DACs as well,
resulting in values that reflect the combined effects of amplifier
gain, DAC non-linearity, DAC units, etc. To do this, follow this
procedure:
a. Build a calibration table for the output, driving the DACs with a
desired voltage and measuring the result, e.g.,
RAW MEAS
--- ----
-10 -9.93
-9 -8.83
0 -0.03
1 0.96
9 9.87
10 10.87
b. Do a least-squares linear fit to get coefficients a, b such that
meas = a * raw + b
c. Note that we want raw output such that our measured result is
identical to the commanded output. This means
cmd = a * raw + b
raw = (cmd - b) / a
As a result, the a and b coefficients from the linear fit can be used
as the scale and offset for the controller directly.
-
MIN_LIMIT = -1000
The minimum limit (soft limit) for axis motion, in user units. When
this limit is exceeded, the controller aborts axis motion.
-
MAX_LIMIT = 1000
The maximum limit (soft limit) for axis motion, in user units. When
this limit is exceeded, the controller aborts axis motion.
-
MIN_OUTPUT = -10
The minimum value for the output of the PID compensation that is
written to the motor amplifier, in volts. The computed output value is
clamped to this limit. The limit is applied before scaling to raw
output units.
-
MAX_OUTPUT = 10
The maximum value for the output of the PID compensation that is
written to the motor amplifier, in volts. The computed output value is
clamped to this limit. The limit is applied before scaling to raw
output units.
-
FERROR = 1.0
MIN_FERROR = 0.010
FERROR is the maximum allowable following error, in user units. If the
difference between commanded and sensed position exceeds this amount,
the controller disables servo calculations, sets all the outputs to
0.0, and disables the amplifiers. If MIN_FERROR is present in the .ini
file, velocity-proportional following errors are used. Here, the
maximum allowable following error is proportional to the speed, with
FERROR applying to the rapid rate set by [TRAJ] MAX_VELOCITY, and
proportionally smaller following errors for slower speeds. The maximum
allowable following error will always be greater than MIN_FERROR. This
prevents small following errors for stationary axes from inadvertently
aborting motion. Small following errors will always be present due to
vibration, etc.
The following polarity values determine how inputs are interpreted and
how outputs are applied. They can usually be set via trial-and-error
since there are only two possibilities. The EMCMOT utility program USRMOT can be used to set these
interactively and verify their results so that the proper values can
be put in the INI file with a minimum of trouble.
-
ENABLE_POLARITY = 0
The polarity for enabling the amplifiers. Set this to 0 or 1 for the
proper polarity. This value can be determined by following all the
electronics back from the amplifier, through any driver circuitry,
etc. or it can be set through a simple trial-and-error. Normally, for
amplifiers which are enabled active-low (0 volts enables), this is a
0.
-
MIN_LIMIT_SWITCH_POLARITY = 1
The polarity for detecting minimum-travel hardware limit switch
trips. Set this depending on how your switches are wired up to the
digital inputs on the I/O board.
-
MAX_LIMIT_SWITCH_POLARITY = 1
The polarity for detecting maximum-travel hardware limit switch
trips. Set this depending on how your switches are wired up to the
digital inputs on the I/O board.
-
HOME_SWITCH_POLARITY = 1
The polarity for detecting homing switch trips. Set this depending on
how your switches are wired up to the digital inputs on the I/O
board.
-
HOMING_POLARITY = 1
The direction in which homing moves are initiated. 0 means in the
negative direction, 1 means in the positive direction.
-
FAULT_POLARITY = 1
The polarity for detecting amplifier faults. Set this to 0 or 1
depending upon how the amplifier sets the logic level for its fault
condition.
The following entries are used to set the parameters for the
DC servomotor simulations. These are only used when running the EMC in
simulation.
-
TORQUE_UNITS = OZ_IN
The units used to interpret subsequent values for ROTOR_INERTIA and DAMPING_FRICTION_COEFFICIENT.
This can be OZ_IN for ounce-inches, LB_FT for pound-feet, or N_M for
newton-meters.
-
ARMATURE_RESISTANCE = 1.10
The resistance, in ohms, of the motor.
-
ARMATURE_INDUCTANCE = 0.0120
The inductance, in henries, of the motor.
-
BACK_EMF_CONSTANT = 0.0254
The back EMF constant, or torque constant, in volts per radian per
second.
-
ROTOR_INERTIA = 0.0104
The rotor inertia, in torque units *
seconds2.
-
DAMPING_FRICTION_COEFFICIENT = 0.083
The damping coefficient, in torque units
per radian per second.
-
SHAFT_OFFSET = 0
The angular offset, in radians, between the the motor initial position
and the encoder initial position. Normally this is 0, but can be made
any arbitrary value if the simulated motor shaft position is
interpreted as the actual axis position and should be something other
than 0 when the encoder reports 0.
-
REVS_PER_UNIT = 10
The amount of motor shaft revolutions per user unit of position. For
example, for a 1/10 inch lead screw, where 10 rotations equals 1 inch,
this would be 10.
The following entry is used to set the parameters for the
amplifier simulations. These are only used when running the EMC in
simulation.
-
AMPLIFIER_GAIN = 1
The gain of the amplifier, which multiplies the input voltage to
generate an output voltage which drives the motor.
-
MAX_OUTPUT_CURRENT = 10
The maximum output current of the amplifier, in amps.
-
LOAD_RESISTANCE = 1.10
The resistance, in ohms, of the load on the amplifier. This is
normally the same as the motor armature
resistance, but it may not be, for example, if there is additional
resistive load between the amplifier and the motor itself.
The following entry is used to set the parameters for the
encoder simulations. These are only used when running the EMC in
simulation.
-
COUNTS_PER_REV = 4096
The number of encoder counts per motor shaft revolution. If
there is gearing between the encoder shaft and the motor shaft, this
value should include this.
[EMCIO] Section
The [EMCIO] section contains control values and setup parameters for
the digital and analog I/O points in EMCIO.
The following entries set general parameters for the I/O controller.
-
CYCLE_TIME = 0.100
The period, in seconds, at which EMCIO
will run. You can make this as small as you want to increase the
throughput. Making it 0.0 or a negative number will tell EMCIO not to sleep at all. Ultimately the system
loading will limit the effective throughput.
-
TOOL_TABLE = tool.tbl
The file which contains tool information. The format of the file is
POC FMS LEN DIAM COMMENT
1 1 0 0
2 2 0 0
where the first line is a comment (in this case the name of the
columns), and the subsequent lines contain the pocket number in which
the tool is located, the tool ID of the tool itself, the length, the
diameter, and an optional comment. The length and diameter are in user
units.
The following entries set parameters for spindle control.
-
SPINDLE_OFF_WAIT = 1.0
How long, in seconds, to wait after the spindle has been turned off
before applying the brake.
-
SPINDLE_ON_WAIT = 1.5
How long, in seconds, to wait after the spindle brake has been
released before turning the spindle on.
The following entries set the bit indices for the digital I/O so that
the controller knows the mapping to I/O point wiring. The indices
start at 0 for the least significant bit in the digital I/O map. See
Setting up the External Interfaces
for information on interfacing I/O boards to the software.
-
ESTOP_SENSE_INDEX = 1
The location of the input bit which is used to detect whether the system is
in ESTOP.
-
LUBE_SENSE_INDEX = 2
The location of the input bit which is used to detect whether the
lubrication level is OK or low.
-
SPINDLE_FORWARD_INDEX = 1
The location of the output bit which is used to drive the spindle
forward. Only applicable to manual spindles.
-
SPINDLE_REVERSE_INDEX = 0
The location of the output bit which is used to drive the spindle in
reverse. Only applicable to manual spindles.
-
MIST_COOLANT_INDEX = 6
The location of the output bit which is used to turn mist coolant on
or off.
-
FLOOD_COOLANT_INDEX = 7
The location of the output bit which is used to turn flood coolant on
or off.
-
SPINDLE_DECREASE_INDEX = 8
The location of the output bit which is used to decrease the spindle
speed. Only applicable to manual spindles.
-
SPINDLE_INCREASE_INDEX = 9
The location of the output bit which is used to increase the spindle
speed. Only applicable to manual spindles.
-
ESTOP_WRITE_INDEX = 10
The location of the output bit which is used to cause an ESTOP.
-
SPINDLE_BRAKE_INDEX = 11
The location of the output bit which is used to engage or release the
spindle brake.
The following entries set the polarities for the digital I/O
points. These can be set by trial-and-error, or by noting the levels
and any inverting done by the electronics between the sensors and
actuators and the electronics.
Using the USRMOT Motion Utility
USRMOT is an interactive text-based utility
that is used to set and test motion parameters for the EMCMOT motion controller. To use USRMOT, first run EMCMOT
standalone (yourprompt> represents whatever your system prompt is):
yourprompt> emcmot
In another window, run the USRMOT utility:
yourprompt> usrmot
motion>
The motion> prompt is displayed by USRMOT
when it runs. Entering a blank line lets you see the status:
motion>
mode: free
cmd echo: 0
split: 0
heartbeat: 605
compute time: 0.014992
traj time: 0.200000
servo time: 0.020000
interp rate: 10
axes enabled: 0 0 0
cmd pos: 0.000000 0.000000 0.000000
act pos: 0.000000 0.000000 0.000000
velocity: 10.000000
accel: 100.000000
id: 0
depth: 0
active depth: 0
inpos: 1
vscales: Q: 1.00 X: 1.00 Y: 1.00 Z: 1.00
logging: closed and stopped, size 0, skipping 0, type 0
homing: ---
enabled: DISABLED
Tuning Servos
For a detailed description of tuning servos, see the following
references:
-
Benjamin C. Kuo, Automatic Control Systems, Fourth Edition.
Defining Complex Kinematics
By default the EMC assumes trivial Cartesian kinematics in which X, Y,
and Z coordinates map directly to motors 0, 1, and 2. You can define
more complex kinematics, for example for a robot, by replacing the
default kinematics functions with your own.
The C language declaration for the kinematics, found in emcmot.h, is
#include "posemath.h" /* PmPose */
extern int forwardKinematics(double * joints, PmPose * pos);
extern int inverseKinematics(PmPose pos, double * joints);
You can replace these with any kinematics you like, provided they
conform to these declarations. Replace the file trivkins.o from the link line that builds emcmot with your own, and rerun the compiler.
Setting up the External Interfaces
The interface between motion control and discrete I/O control points
and the software is declared in the C language header file extintf.h.
For example, one of the external APIs is
/*
extDacWrite(int dac, double volts)
writes the value to the DAC at indicated dac, 0 .. max DAC - 1.
Value is in volts. Returns 0 if OK, -1 if dac is out of range.
*/
extern int extDacWrite(int axis, double voltage);
which is called by the motion controller to output a voltage to the
motor velocity amplifiers. For a particular digital-to-analog
converter board, the function would be implemented as something like:
/* specific function to output voltage for my board */
int myBoardDacWrite(int axis, double voltage)
{
short int vout;
vout = (short int) (voltage / 10.0 * 0xFFFF);
_outw(0x280 + axis, vout);
return 0;
}
/* mapping of my function to API */
int extDacWrite(int axis, double voltage)
{
return myboardDacWrite(axis, voltage);
}
Another external API is
/* reads value of digital input at index, stores in value */
extern int extDioRead(int index, int *value);
which is called by the discrete I/O controller to read a digital input
into the 'value' variable, from the I/O point at the specified
'index'. For a particular digital I/O board, the function would be
implemented as something like:
/* specific function to input value from myboard */
int myBoardDioRead(int index, int *value)
{
unsigned char mask;
mask = 1 << index % 8;
*value = (_inb(0x380 + index / 8) & mask) ? 1 : 0;
return 0;
}
/* mapping of my function to API */
int extDioRead(int index, int *value)
{
return myboardDioRead(index, value);
}
The code above is referred to as a "wrapper" for myboard. NIST has
written wrappers for some specific boards. See Wrapped Hardware for more information.
Starting Up
The EMC can be started up by scripts, which take command line
arguments for the various files if their names are to be
overriden. The scripts should be run in the directory in which the
configuration file are located, unless they are overriden with paths
to alternate files. The conventional practice is to create a script
file called run.emc based on one of the
example run scripts, and run it in the top-level emc directory where
the configuration files emc.ini and emc.nml are located. The syntax is:
./run.sunos5
Control Platforms
From the point of view of technology transfer, the EMC has strived to
provide software which is of high performance yet can be run on
inexpensive computing platforms. The target platform for control is a
PC-compatible desktop computer, 386-compatible or higher, with a
minimum of additional hardware. We have ported our software to the
Linux operating system, since it is free and has free real-time
support from New Mexico Tech. We also run in simulation on most
Unixes, and Microsoft Windows NT. The following are some links to
related Web sites.
|
|
No approval or endorsement of any commercial product by the National
Institute of Standards and Technology is intended or implied. Certain
commercial equipment, instruments, or materials are identified in this
report in order to facilitate understanding. Such identification does
not imply recommendation or endorsement by the National Institute of
Standards and Technology, nor does it imply that the materials or
equipment identified are necessarily the best available for the
purpose.
|
PC Hardware
These links provide information on PC-compatible hardware in
general. Go here for technical specs, pinouts, I/O addresses and
register bitmaps, etc.
Linux Documentation
There is a world of free information on Linux, the free Unix-like
operating system for 'most any platform. You can get it for PCs,
Macintoshes, Sparc workstations, notebook computers, and more.
Linux Software
Third parties provide shrink-wrapped Linux packages which save you the
trouble of ftp-ing 20 megabytes of code from Finland over your 28.8
kbps modem overnight. You can also find lots of free software for
Linux.
- Linux Distributions
Commercial versions of Linux, with manuals, graphical installation and
configuration tools, etc. on a CD.
Real-time Linux
Michael Barabanov and Victor Yodaiken of New Mexico Tech modified the
Linux source slightly, inserting a real-time scheduler between Linux
and the hardware interrupts it used to receive. Now, your code can run
in the scheduler, with Linux running when you're done. Tasks can run
at cycle times down to about 50 microseconds or so. That's 20
kilohertz in real-time on your desktop PC.
- Real-time Linux
New Mexico Tech's Linux tour de force, giving Linux real-time
determinism. RT-Linux is not a real-time operating system, but a
real-time subsystem, in which code that requires limited
operating system resources can run without being bothered.
Programming Linux
Information on accessing hardware or operating system resources not
covered in general C language textbooks.
- IO
Port Programming
Here's something on programming Intel X86 I/O ports in Linux, via the
usual inb() and outb() functions.
- Using Shared Memory in RT-Linux
Linux and RT-Linux processes communicate between themselves using FIFOs,
but shared memory has some advantages. Here's information on how to
set it up and use it.
Wrapped Hardware
We have written APIs to some hardware for our installations, giving
them the functional interface we program to in our
EMC code. Here
are some of them.
- External Interface API
The C language header file for API used by the EMC software when
reading and writing to I/O boards for A/D, D/A, digital I/O, encoders,
et cetera. Implementations of these functions need to be written by
EMC integrators. In the body of these functions should be calls to the
specific boards used in the implementation.
extintf.h
- Servo To Go, Inc.
Servo To Go 4- and 8-axis electronic interface card, with D/A
converters, encoder quadrature counters, digital I/O, optional analog
input. EMC supports the Model 1 board. We don't yet have a driver for
the Model 2 board. If you're going to use this board, here are the pin
assignments.
stg.h
stg.c
extstgmot.c
- Parallel Port for Digital I/O
The PC parallel port can be used for 12 general-purpose digital
outputs and 5 digital inputs.
parport.h
parport.c
extppt.c
|
